[QUOTE = "dörtlü posta, yayın: 1301798, üye: 66563"]
Hikayenin son bir hareket zamanı.
Wiki, Gimbal Top kurulu için tüm firmware bölümlerinin indirilmesiyle güncellendi:
DaVinci medya işlemcilerinde yanıp sönen üretici yazılımı · mefistotelis / phantom-firmware-tools Wiki · GitHub
Kesin olarak, her ürün yazılımı güncellemesinin parçası olan bölümlerin yanı sıra. Ancak bunlar herhangi bir üretici yazılımı güncellemesinden kolayca çıkarılabilir:
[KOD] ./ dji_fwcon.py -vvv -x -p P3X_FW_V01.07.0060.bin
P3X_FW_V01.07.0060_m0800.bin-P3X_FW_V01.07.0060_m0800_decrypted.tar.gz ile açılır desl -d -k Dji123456
tar -zxf P3X_FW_V01.07.0060_m0800_decrypted.tar.gz
[/ KOD]
Dosyalar ayıklandıktan sonra, dji / data / uImage dosyası doğrudan birincil çekirdek olarak doğrudan yanıp sönebilir ve u-boot bölümleri bir işlem daha gerektirir:
[KOD] dd eğer = dji / veri / u-boot.img = u-boot_prop.img bs = 2048 atlama = 1
dd ise = dji / data / ubl_297m_1.img = ubl_297m_1_prop.img bs = 2048 atlama = 1
[/ KOD]
Böylece yukarıdaki komutlar, ayrıca wiki'deki indirmeler, bana bütün bölümleri verdi:
- iki adet u-boot görüntüsü (u-boot_prop.img ve ubl_297m_1_prop.img)
- birincil çekirdek (uImage)
- kurtarma çekirdeği (uImage_recovery)
- gizli bölüm (dm365_secret.bin)
- kök dosya sistemi (dm365_root_ubifs.ubi)
Tüm görüntüleri wiki'de anlatıldığı gibi yazdım. Yalnızca kök dosya sistemi biraz aldatıcıdır - diğer görüntülerden farklı bir şekilde yazılmıştır ve aynı zamanda en büyük görüntüdür. Yine de çok büyük değil - seri üzerinden aktarmak 2 saatten fazla sürmemelidir (USB kullanabildim, bu yüzden aktarım çok hızlıydı).
USB’de - benimki çalışırken, USB’nin başlatılması kolay olan bazı panolarda görünüyor. Çalışmak istemiyorsa, sadece seri kullanmak daha iyidir - kurtarma sistemi başlatılırken kök dosya sistemi görüntüsü ramdisk'e sığacak kadar küçüktür (wiki kurtarma sisteminin nasıl hazırlanacağını açıklar).
Her şey parladıktan sonra, OFDM kartıyla bağlantısı olmadığından kart sürekli olarak yeniden başlatılmaya başladı:
[KOD] DM36x başlatması geçildi!
UBL Ürün Vesion: DJI-297M-UBL-1.0-rc0 (2015-10-30)
Dji UBL Versiyon: 1.51 (2 Kasım 2015 - 15:45:39)
Önyükleme Kataloğu Önyükleyici
BootMode = NAND
NAND Copy başlatılıyor ...
Geçerli magicnum, 0xA1ACED66, 0x00000019 bloğunda bulundu.
TAMAMLANDI
0x81080000 adresindeki giriş noktasına atlama.
U-Boot Ürünü Vesion: DJI-ENC-Uboot-1.0-rc0 (2015-11-02)
U-Boot 2010.12-rc2-svn3205-Dji (02 Kasım 2015 - 19:07:26)
Çekirdek: ARM 297 MHz
DDR: 270 MHz
I2C: hazır
DRAM: 128 MiB
NAND: 128 MiB
MMC: davinci: 0
Hatalı blok tablosu, sayfa 65472'de, 0x01 sürümünde bulundu
Hatalı blok tablosu, sayfa 65408'de, 0x01 sürümünde bulundu
*** Uyarı - hatalı CRC, varsayılan ortamı kullanarak
Net: Ethernet PHY: GENERIC @ 0xff
DaVinci-EMAC
Otomatik önyüklemeyi 1 saniye içinde iptal etmek için ESC tuşuna basın
Nand0'dan yükleme, 0x4a0000 uzaklık
** Bilinmeyen resim türü
Bootm komutu için yanlış görüntü formatı
HATA: Çekirdek imajı elde edilemiyor!
Nand0'dan yükleme, 0x900000 ofset ofset
Resim Adı: Linux-2.6.32.17-davinci1
Oluşturuldu: 2015-03-30 9:54:39 UTC
Resim Türü: ARM Linux Çekirdek Resim (sıkıştırılmamış)
Veri Boyutu: 4032832 Bayt = 3.8 MiB
Yükleme Adresi: 80008000
Giriş Noktası: 80008000
## 80700000'de Legacy Image'den çekirdeği önyükleme ...
Resim Adı: Linux-2.6.32.17-davinci1
Oluşturuldu: 2015-03-30 9:54:39 UTC
Resim Türü: ARM Linux Çekirdek Resim (sıkıştırılmamış)
Veri Boyutu: 4032832 Bayt = 3.8 MiB
Yükleme Adresi: 80008000
Giriş Noktası: 80008000
Çekirdek Resim yükleniyor ... OK
tamam
Çekirdeğin başlatılması ...
[0.000000] Çekirdek Ürünü Vesion: DJI-NOHDMI-WM610-Çekirdek-1.0-rc6 (2015-03-30)
[0.000000] Linux sürüm 2.6.32.17-davinci1 (root @ dji) (gcc sürüm 4.3.3 (Sourcery G ++ Lite 2009q1-203)) # 16 PREEMPT Pzt 30 Mar 17:54:38 HKT 2015
CPU: ARM926EJ-S [41069265] revizyon 5 (ARMv5TEJ), cr = 00053177
[0.000000] CPU: VIVT veri önbelleği, VIVT komut önbelleği
[0.000000] Makine: DaVinci DM36x EVM
[0.000000] Bellek politikası: ECC devre dışı, Veri önbelleği geri yazma
[0.000000] DaVinci dm36x_rev1.2 değişkeni 0x8
[...]
[7.650000] usbcore: kayıtlı yeni arayüz sürücüsü usb_68013
[7.680000] usb 68013 modülü init tamam
sulogin: root için şifre girişi yok
giriş [453]: 'ttyS0' adresinde root girişi
#Process / etc / profile ...
Dji-Pro @ root: ~ #
encode_usb V00.02.02.00 (3 Kasım 2015 11:23:52).
Giriş şifrelemek qury modu
Init libusb faild!
V [10.050000] EVM'i algılamak için otomatik: ambarella video girişine geç
ideo giriş tipi:
Varsayılan video girişi seçildi: Hdmi_yuv
Video standardının şu şekilde ayarlanması: 0x100000000000000
Yakalama girişi Hdmi [10.060000] olarak ayarlanmış davinci_resizer davinci_resizer.2: RSZ_G_CONFIG: 0: 1: 124
_yuv: 11
[10.070000] davinci_previewer davinci_previewer.2: ipipe_set_preview_config
[10.080000] vpfe yakalama vpfe yakalama: IPIPE Zinciri
[10.080000] vpfe-yakalama vpfe-yakalama: Resizer hazır
VideoStd'yi Yakalayın [10.090000] EVM: ambarella video girişine geç
Eski = 0000000b
[10.090000] vpfe yakalama vpfe yakalama: genişlik = 1280, yükseklik = 720, bpp = 1
[10.100000] vpfe-yakalama vpfe-yakalama: ayarlanmış genişlik = 1280, yükseklik = 720, bpp = 1, bytesperline = 1280, boyut görüntüleme = 1382400
[10.110000] vpfe-yakalama vpfe-yakalama: genişlik = 1280, yükseklik = 720, bpp = 1
[10.120000] vpfe-yakalama vpfe-yakalama: ayarlanmış genişlik = 1280, yükseklik = 720, bpp = 1, bytesperline = 1280, boyut görüntüleme = 1382400
videoFrameRate = 30000, genişlik = 1280, yükseklik = 720
Venc1.c: minNumOutBufs 2, minOutBufSize [0] 1382400, minOutBufSize [1] 800
GOP aralığı: 30, outBufSize: 1382400, enAdpBW: 1, airRate = 0, dilim = 6, VUI = 4, timeScale = 60001
osdThrFxn: işlem kimliği 458 ***********
bekçi köpeği zaman aşımı: 5
ctrlThrFxn: işlem kimliği 450 ***********
Frma: 1 Pslice = 0, Islice = 8 [44ms]
GetFPGAstatus err!
FPGA [1,0,1,0] -1,000000: 0
hdmi durumu 1
usblink durum kontrolü ~~~~~~~~~~~~~~~~~~~~~
GetFPGAstatus hata!
inptVD = 0547
USB cihaz kimliği yok: 547
68013 sıfırlamayı deneyin ....!
ARM Yük: 61% Video fps: 4 fps Video bit hızı: 0 kbps PHY Bant Genişliği: 0 kbps Süre: 00:00:02 Çözünürlük: 1280x720
GetFPGAstatus err!
FPGA [1,0,1,0] -1,000000: 0
hdmi durumu 1
ARM Yük: 2% Video fps: 0 fps Video bit hızı: 0 kbps PHY Bant Genişliği: 0 kbps Süre: 00:00:04 Çözünürlük: 1280x720
GetFPGAstatus err!
FPGA [1,0,1,0] -1,000000: 0
hdmi durumu 1
usblink durum kontrolü ~~~~~~~~~~~~~~~~~~~~~
GetFPGAstatus hata!
inptVD = 0547
USB cihaz kimliği yok: 547
68013 sıfırlamayı deneyin ....!
ARM Yük:% 5 Video fps: 3 fps Video bit hızı: 0 kbps PHY Bant Genişliği: 0 kbps Süre: 00:00:05 Çözünürlük: 1280x720
GetFPGAstatus err!
FPGA [1,0,1,0] -1,000000: 0
hdmi durumu 1
usblink durum kontrolü ~~~~~~~~~~~~~~~~~~~~~
GetFPGAstatus hata!
inptVD = 0547
USB cihaz kimliği yok: 547
68013 sıfırlamayı deneyin ....!
ARM Yük: 9% Video fps: 7 fps Video bit hızı: 0 kbps PHY Bant Genişliği: 0 kbps Süre: 00:00:07 Çözünürlük: 1280x720
umount: hiçbirini salt okunur yapamaz
umount: mdev meşgul - yalnızca salt okunur
Sistem şimdi çöküyor!
SIGTERM'i tüm işlemlere gönderdi
SIGKILL'i tüm işlemlere gönderdi
Sistemin yeniden başlatılması isteniyor
[/ KOD]
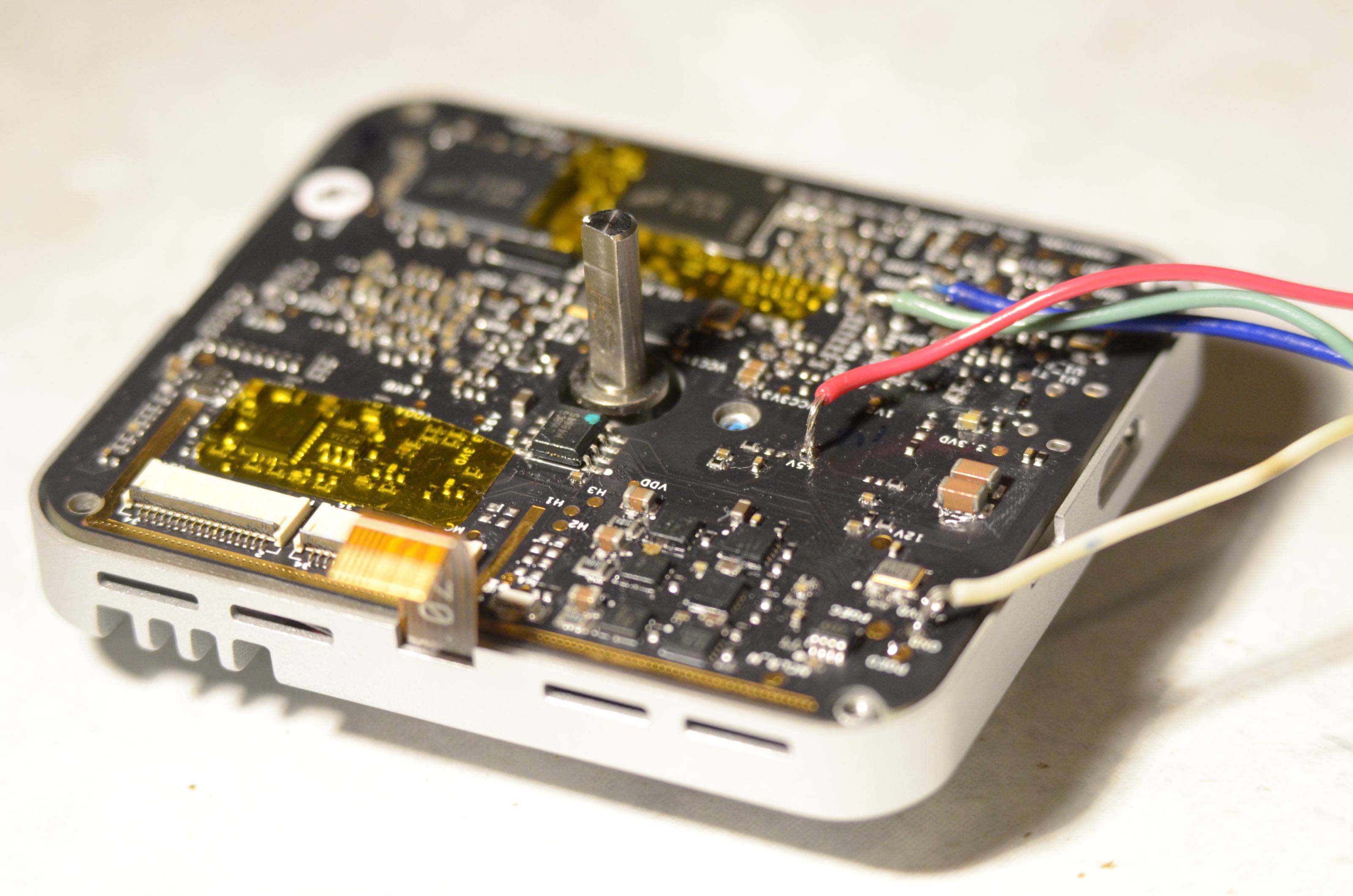
Gimbal'ı tekrar birleştirdim, test ettim ve (hatalarımdan dolayı iki kısmi tekrar toplanmadan sonra) - her şey çalışmaya başladı.
Tabletteki FPV videosu geri yüklendi.
GÜNCELLEME - NAND değişiminden sonra 8 FPS FPV ile ilgili olarak:
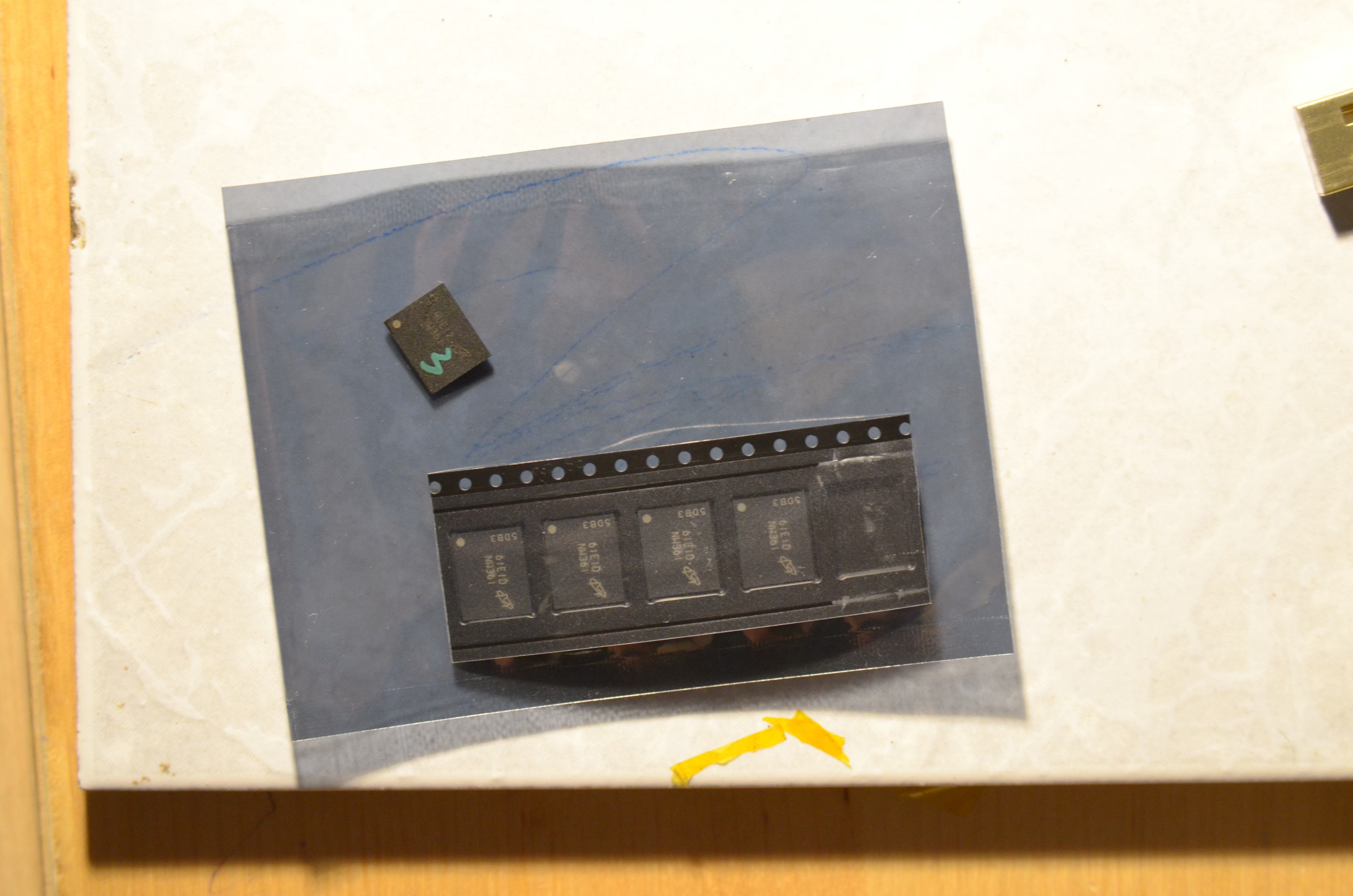
NAND çipini tanımladığım gibi değiştirdikten sonra olan bir sorun hakkında birkaç kişi benimle irtibata geçti. Mesele şu ki, mobil cihazdaki canlı yayın çok dalgalı - saniyede sadece 8 kare çalışıyor.
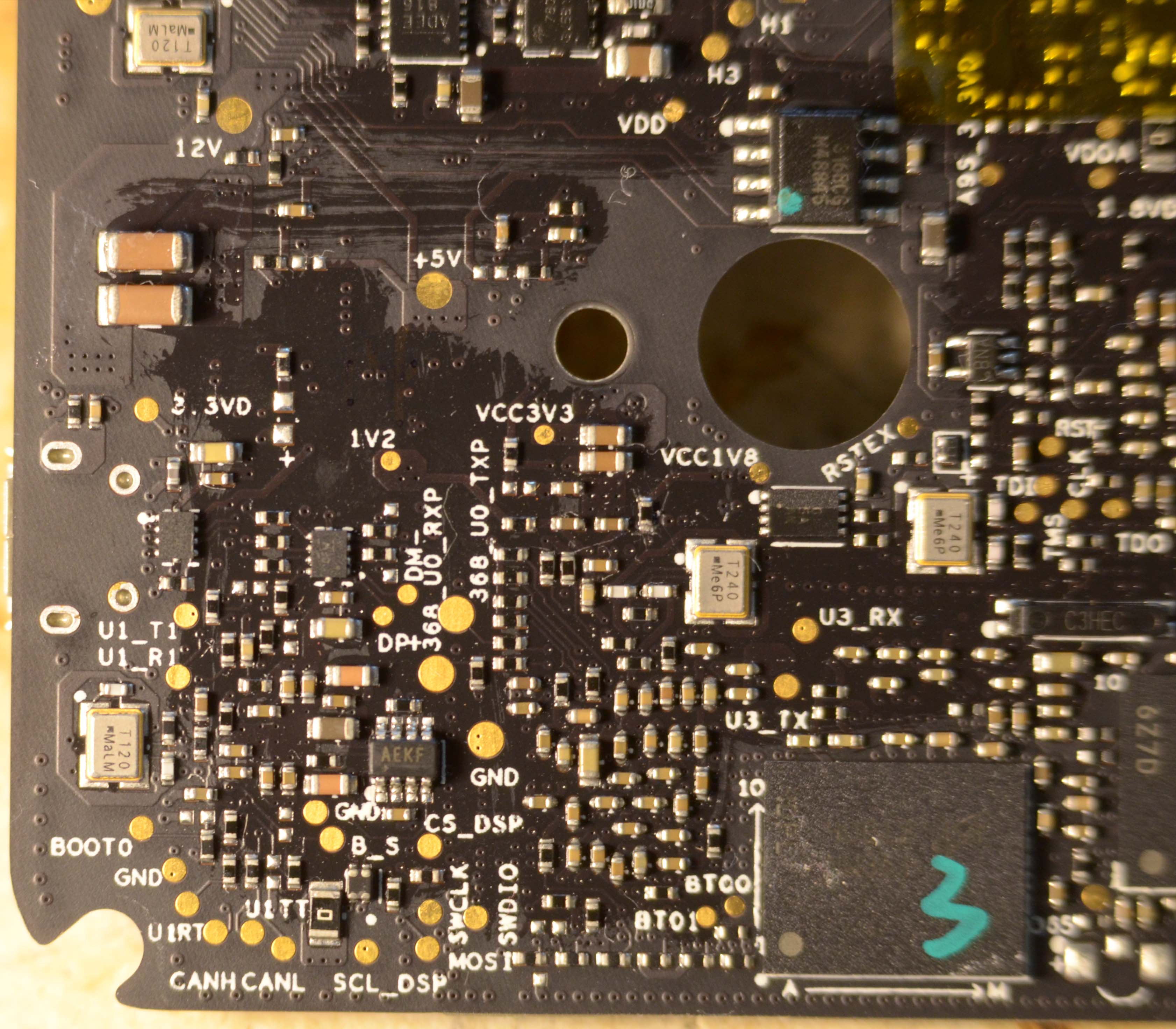
Sorun şifreleme yetenekleri sağlayan SHA204 yongası ile ilgili olarak teşhis edildi. Çip genellikle kullanılmaz, ancak şifreleme uyuşmazlığı tespit edildiğinde, şifreleme testlerini tekrar tekrar dener ve büyük miktarda işlem gücü tüketir.
Son zamanlarda, DM365 üretici yazılımını değiştirmek ve yeniden denemeler mekanizmasını kaldırmak için kullanılabilecek bir araç yayınlandı ve bu da FPV'yi tam hıza getirdi. Aracı burada:
dji-firmware araçları - dm3xx_trk_usb_hardcoder
P3X ürün yazılımının birkaç popüler sürümü bu arşivde önceden oluşturulmuş değiştirilmiş dosyalara sahiptir:
P3X_FW_fix_for_encrypt_8fps-v4.7z
Bu dosyaların bu arşiv içinde README'de nasıl kullanılacağına dair bazı bilgiler var, ancak ayrıntılardan yoksun.
[USER = 111172] @ GUCCI40 [/ USER] ile olan işbirliğimiz sayesinde, 8fps hatasını düzeltmek için bu arşivi kullanma konusunda detaylı bir talimatımız var:
1. uygun .elf dosyasını yeniden adlandırmak için
encode_usb (uzantısız)
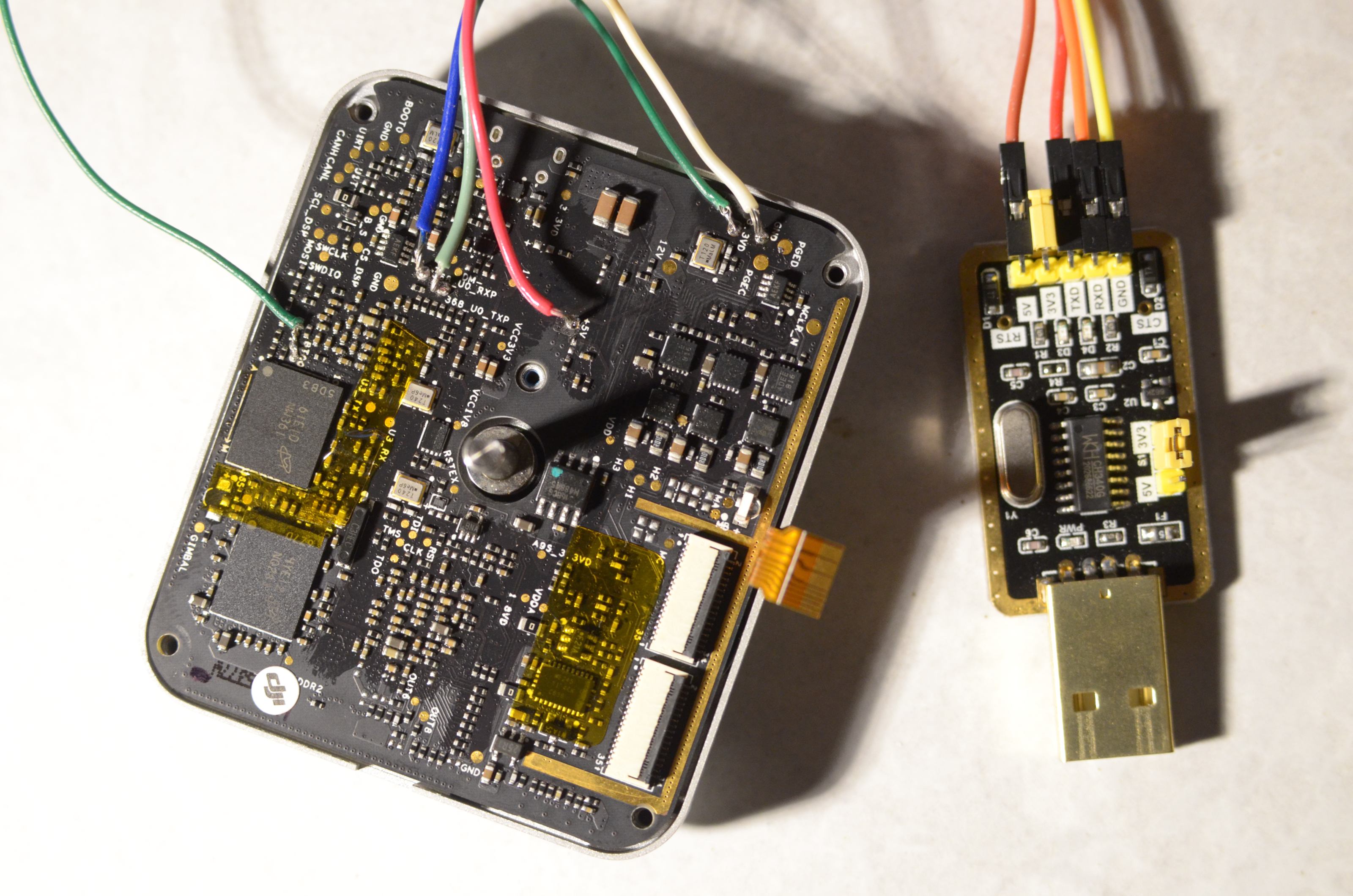
2. kartı seri bağlanmış ve "
PuTTY Extra " açılmış olarak başlatın
3. tahta önyükleme bittiğinde, kabuğu yazın:
[KOD] durdurma [/ KOD]
4. sorunsuz dosya yazabileceğiniz bir dizine gidin, örn .:
[KOD] cd / tmp [/ KOD]
5. kabuğa yazın:
[KOD] lrz --ymodem –b [/ KOD]
ve "
PuTTY Extra " menüsünde transfer edilecek dosyayı seçin
6. aktarımı bekleyin; dosya geçerli dizine yazılacaktır. Dosyanın "
ls -a " ile olup olmadığını kontrol edin .
7. Kabuk yazarak orjinal `
encode_usb` yedeğini
alın :
[KOD] mv / opt / dji / bin / encode_usb /opt/dji/bin/encode_usb.bkpFF/CODE]
8. yModem üzerinden aktarılan dosyayı, yerine yazarak taşıyın:
[KOD] mv ./encode_usb / opt / dji / bin / encode_usb [/ KOD]
9. yeni dosyayı kabuk yazarak çalıştırılabilir olarak işaretleyin:
[KOD] chmod a + x / opt / dji / bin / encode_usb [/ KOD]
İşte bu - komutlardan sonra hiçbir hata gösterilmezse, 8 fps sorunu giderilir.
[/ALINTI]
Herkese selam, ancak yüklenecek dosyaları bulamadım.


phantompilots.com