- Joined
- Oct 16, 2018
- Messages
- 23
- Reaction score
- 6
- Age
- 54
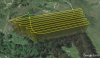
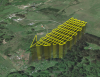
Hi, I'm flying a Phantom 3 Professional and using Litchi for mission planning and flying. Intending to try out WebODM for processing.
I am flying the 10 acre farm where I work, making an orthophoto for mapping purposes. On a shoestring budget.
Never done this before though I have experience with GIS and UAS flying / photography.
My Question:
What is ideal:
spacing (how far apart should each pass over the land be? At present I have it set for 15m )
altitude (I'm thinking 100m AGL)
speed (I have no idea but I assume slower is better, thinking maybe 20km/h)
and frequency (I'm thinking a photo every two seconds)
Any advice appreciated, thanks!!
I am flying the 10 acre farm where I work, making an orthophoto for mapping purposes. On a shoestring budget.
Never done this before though I have experience with GIS and UAS flying / photography.
My Question:
What is ideal:
spacing (how far apart should each pass over the land be? At present I have it set for 15m )
altitude (I'm thinking 100m AGL)
speed (I have no idea but I assume slower is better, thinking maybe 20km/h)
and frequency (I'm thinking a photo every two seconds)
Any advice appreciated, thanks!!