

Fortunately I was out in a field. I flew it out a couple of hundred feet and then I noticed it wasn't behaving according to the controls. I was trying to bring it back for a landing by watching its behavior as I manipulated the controls. I managed somehow to bring it back but the flight path was very erratic and the landing very hard. (GPS & Home Lock). 
Tried again another day; same thing, only this time hit a tree. I made sure that I gave the GPS as much time as it needed to lock on to the satellites. Hmmm, I didn't' get a single green LED, what I got was green-green-pause-(repeat).
So, up until this my flights have been uneventful
I'm trying to think back to what had changed between the good flights and the bad. First, I added the ARRIS CM2000 gimbal. I don't really think this is it because I ran a single test flight after that and it behaved nicely. Next flight I had tweaked some settings on the Phantom.
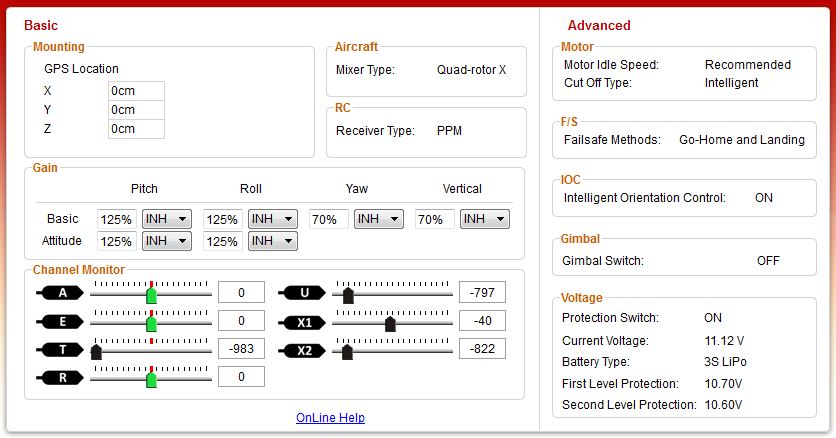
I had put pitch and roll at 100%, yaw and vertical at 70%. This was the setting for the first flyaway.
So I put pitch and roll back to the original 125% but left the yaw and vertical at 70%. This was the settings for the second flyaway, though the second fly away was no where near as erratic as the first flyaway.
Apparently the pitch and roll tweaks added to the problem. I'm not sure that the yaw and vertical had anything to do with it. I'm not sure what the green-green LED lights mean. And I'm not 100% convinced that the gimbal didn't have anything to do with it.
Help!
Tried again another day; same thing, only this time hit a tree. I made sure that I gave the GPS as much time as it needed to lock on to the satellites. Hmmm, I didn't' get a single green LED, what I got was green-green-pause-(repeat).
So, up until this my flights have been uneventful
I'm trying to think back to what had changed between the good flights and the bad. First, I added the ARRIS CM2000 gimbal. I don't really think this is it because I ran a single test flight after that and it behaved nicely. Next flight I had tweaked some settings on the Phantom.
I had put pitch and roll at 100%, yaw and vertical at 70%. This was the setting for the first flyaway.
So I put pitch and roll back to the original 125% but left the yaw and vertical at 70%. This was the settings for the second flyaway, though the second fly away was no where near as erratic as the first flyaway.
Apparently the pitch and roll tweaks added to the problem. I'm not sure that the yaw and vertical had anything to do with it. I'm not sure what the green-green LED lights mean. And I'm not 100% convinced that the gimbal didn't have anything to do with it.
Help!


