Hello All,
New user in this forum, Bought my P3-A abt 2 weeks ago, Been flying for years with cheaper models of helicopters and quad copters.....I had my eyes on the Phantom for years and watch it grow. Finally bit the bullet.
In any event on my third fly something strange happened, I did the pre-flight checks and calibrations, all went OK started it and hovered to abt 5-feet and then slowly went to 20 and right at 35-feet or so the drone started to spin out of control and then Yessssss The Dreadful Crash. It was a sad seen..... The Gamble Broke the camera disconnected and broke from the arm....The shell seem to be OK, the antenna on the leg popedoff, any how you can imagine.
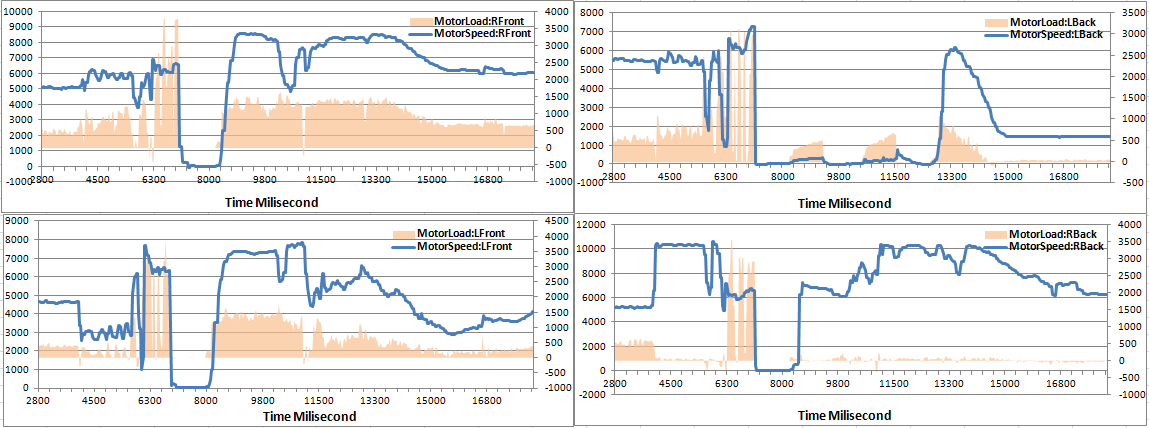
With help from this forum I figured out to download the *.DAT and *.TXT file and started to dig in there. Looking at the files it seems the that right abt 25-feet it did a mode change for what ever the reason was(I had good GPS and Satellite count) and the motor obstructed, which I think it either seized and or stopped thus the spin and crash.......
Reading this forum I saw several other threads that they seem to have a similar issue, In any event I am contacting the Dji on Monday to see where I can go with this...
What I am Wondering is that if any of you who are more acclimated in understanding the either the log file or txt file any insight is appreciated......I will keep this thread open and will update as my communication advances with dji
Date of Flight: 5/7/2016
Duration: 1m57s
Link to the files:
New user in this forum, Bought my P3-A abt 2 weeks ago, Been flying for years with cheaper models of helicopters and quad copters.....I had my eyes on the Phantom for years and watch it grow. Finally bit the bullet.
In any event on my third fly something strange happened, I did the pre-flight checks and calibrations, all went OK started it and hovered to abt 5-feet and then slowly went to 20 and right at 35-feet or so the drone started to spin out of control and then Yessssss The Dreadful Crash. It was a sad seen..... The Gamble Broke the camera disconnected and broke from the arm....The shell seem to be OK, the antenna on the leg popedoff, any how you can imagine.
With help from this forum I figured out to download the *.DAT and *.TXT file and started to dig in there. Looking at the files it seems the that right abt 25-feet it did a mode change for what ever the reason was(I had good GPS and Satellite count) and the motor obstructed, which I think it either seized and or stopped thus the spin and crash.......
Reading this forum I saw several other threads that they seem to have a similar issue, In any event I am contacting the Dji on Monday to see where I can go with this...
What I am Wondering is that if any of you who are more acclimated in understanding the either the log file or txt file any insight is appreciated......I will keep this thread open and will update as my communication advances with dji
Date of Flight: 5/7/2016
Duration: 1m57s
Link to the files: