Have you tried the gimbal by disabling rc pitch?
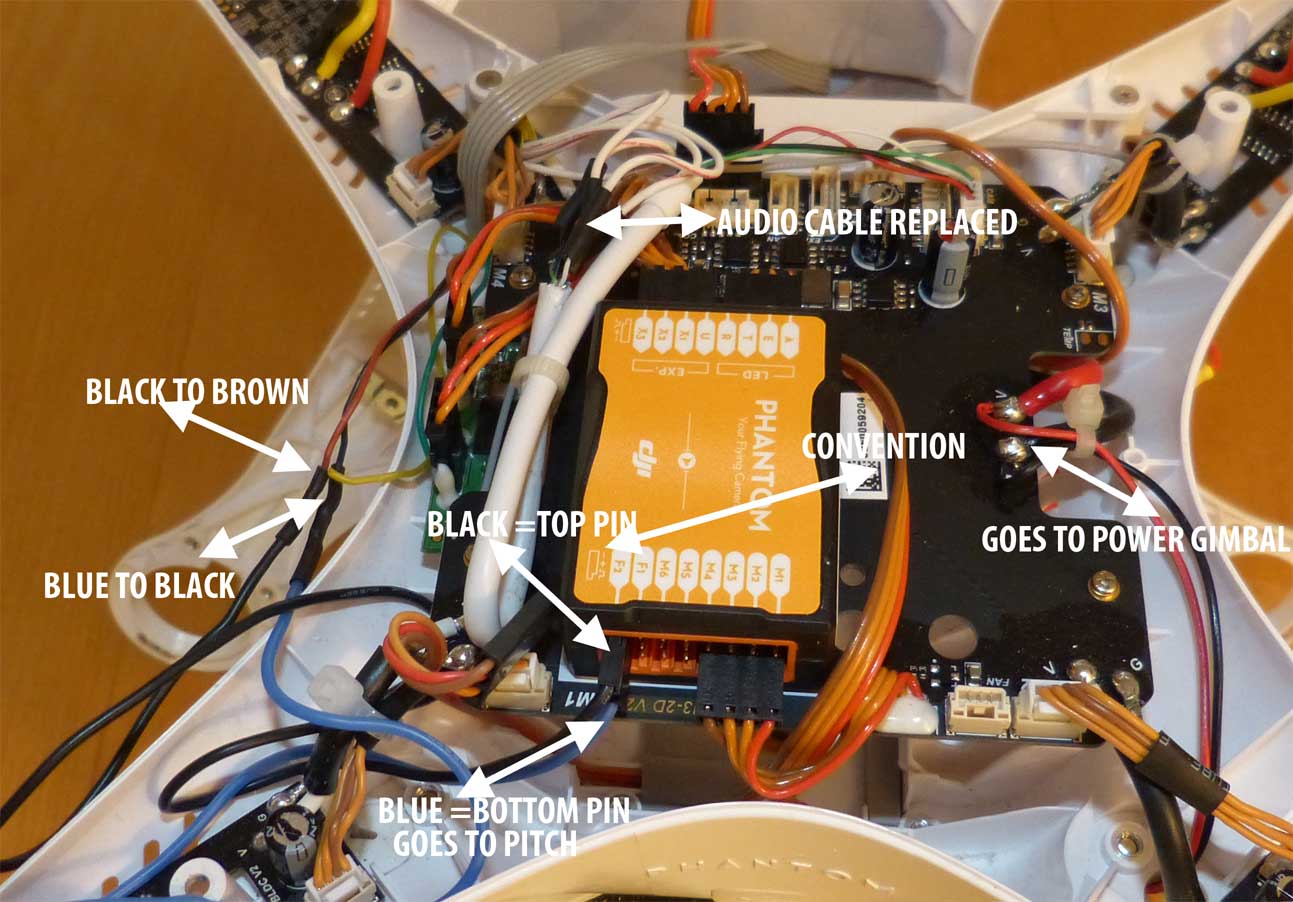
If not remove your pitch plug from the Gimbal.
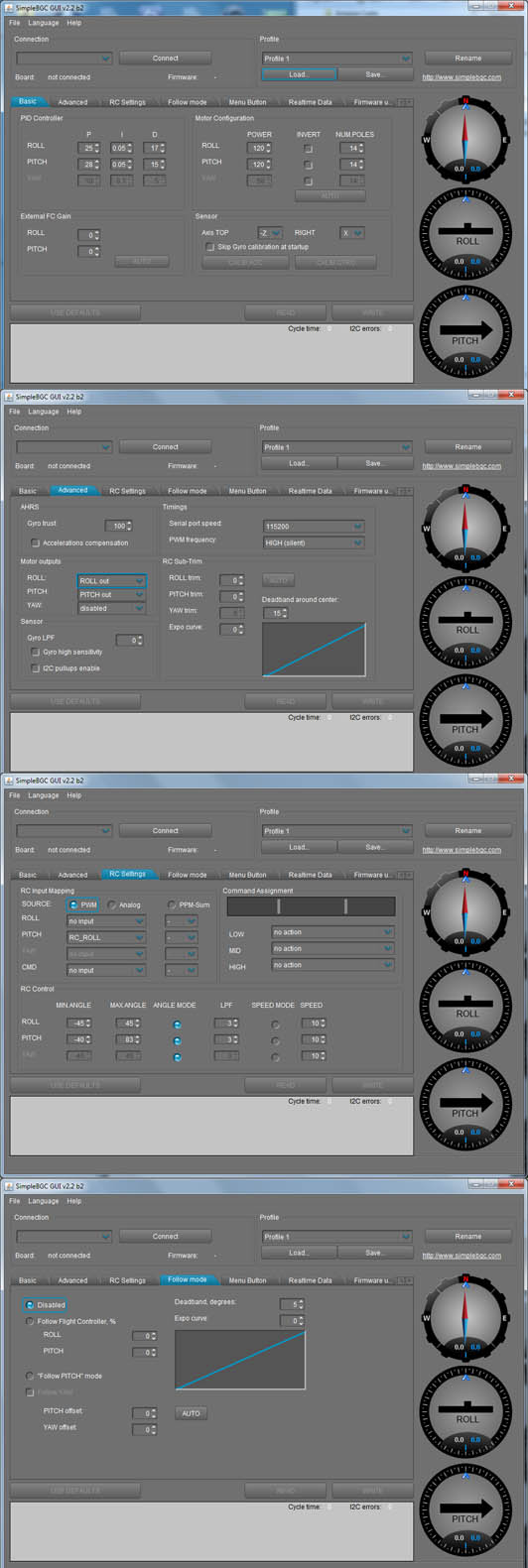
Under RC settings in the simple BGC under roll and pitch change to no input in rc-roll and no input in rc-pitch.
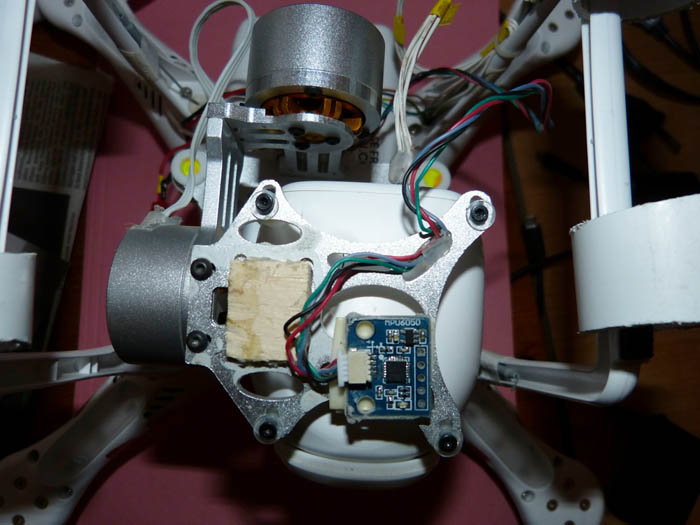
Your IMU (picture below) has to be 100% fixed to the board (it shouldn't wiggle at all)
All the cables should be free and not binding at all when you move the gimbal around unpowered.
Now power the gimbal and check whehter it works.
If its still behaving strangly try a 6 point calibration. Remove the connectors to the servo motors and plug the USB (as per video).
https://www.youtube.com/watch?v=fNrUNJOb4tY
When you've done IMU calibration check if pitch roll are behaving ok when you move the IMU sensor by looking at the gauges on simpleBGC software.
Place back the IMU sensor and connect motors and check again if it works-