After running the update, (there were two update and power off -power on cycles) my stock PV2 accepted the new firmwares with no difficulties.
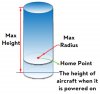
Under the Advanced tab you will find a Limits tab that is preset for a 1600 m by 400 m (about 1 mile x .25 mile) cylinder.
I reset my cylinder to 500 ft x 150 ft for the purposes of this test flight.
In GPS mode (10 to 11 satellites) the PV2 wold not venture outside the range/altitude cylinder. At 150 feet altitude, full left stick up deflection did nothing. I could hear no increase in power to try to fly out of the top of the cylinder. It was as if the climb signal was not sent to the PV2. Still in GPS, the craft flew uprange to 500 feet and stopped as expected, and would not depart the sides of the cylinder.
In ATTI mode the vertical portion of the cylinder stayed intact. I could not fly above the preset 150 foot limit. (I thought in ATTI we'd be able to exceed the cylinder limits.) Again in ATTI mode the craft flew right through the 500 foot radius limit. Once outside the radius limit, I tried to climb above 150 feet, but it would not climb any higher. So, on this test flight, in ATTI, I could fly out of the sides of the cylinder but not the top of the cylinder, and I could not climb above the preset 150 foot limit in either case.
The new 3m/sec descent rate is still generous enough to make an expeditious descent. In fact, I did not try full left stick down deflection; it would have been more than I consider safe for a PV2 descent rate. The 3 m/sec descent rate will NOT prevent rotor vortex issues. In my opinion, we will still have to use caution in our descents to avoid loss of control problems.
I did about 6 or seven (no wind) ground landings. I am normally a hand-landing guy – and will continue to be..., but the landing protocol seemed a bit more docile than before. But just as before we will want to not allow our PV2 to dwell in prop wash ground effect while landing. And we must kill any drift in the landing phase. After that said, I will still hand land my PV2 and not take the risk of landing tip-overs.
Under the Advanced tab you will find a Limits tab that is preset for a 1600 m by 400 m (about 1 mile x .25 mile) cylinder.
I reset my cylinder to 500 ft x 150 ft for the purposes of this test flight.
In GPS mode (10 to 11 satellites) the PV2 wold not venture outside the range/altitude cylinder. At 150 feet altitude, full left stick up deflection did nothing. I could hear no increase in power to try to fly out of the top of the cylinder. It was as if the climb signal was not sent to the PV2. Still in GPS, the craft flew uprange to 500 feet and stopped as expected, and would not depart the sides of the cylinder.
In ATTI mode the vertical portion of the cylinder stayed intact. I could not fly above the preset 150 foot limit. (I thought in ATTI we'd be able to exceed the cylinder limits.) Again in ATTI mode the craft flew right through the 500 foot radius limit. Once outside the radius limit, I tried to climb above 150 feet, but it would not climb any higher. So, on this test flight, in ATTI, I could fly out of the sides of the cylinder but not the top of the cylinder, and I could not climb above the preset 150 foot limit in either case.
The new 3m/sec descent rate is still generous enough to make an expeditious descent. In fact, I did not try full left stick down deflection; it would have been more than I consider safe for a PV2 descent rate. The 3 m/sec descent rate will NOT prevent rotor vortex issues. In my opinion, we will still have to use caution in our descents to avoid loss of control problems.
I did about 6 or seven (no wind) ground landings. I am normally a hand-landing guy – and will continue to be..., but the landing protocol seemed a bit more docile than before. But just as before we will want to not allow our PV2 to dwell in prop wash ground effect while landing. And we must kill any drift in the landing phase. After that said, I will still hand land my PV2 and not take the risk of landing tip-overs.
")