


So i will try to make it short and show some good pictures.
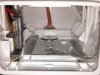
1. Mark out hole by mounting gimbal dampener bracket. I also did not want to take it all apart so i made a little box from cardboard to put in battery slot to catch all the shavings as well as put a vacuum in there.
2. Cut hole with dremel tool and clean up the edges by sanding.
3. Fit the gimbal onto the P2. I used neoprene washers i got from Homedepot. These worked perfect and the are rubber like, so they can help unwanted vibrations.
1. Mark out hole by mounting gimbal dampener bracket. I also did not want to take it all apart so i made a little box from cardboard to put in battery slot to catch all the shavings as well as put a vacuum in there.
2. Cut hole with dremel tool and clean up the edges by sanding.
3. Fit the gimbal onto the P2. I used neoprene washers i got from Homedepot. These worked perfect and the are rubber like, so they can help unwanted vibrations.







 Or does the size not matter too much, I wonder?
Or does the size not matter too much, I wonder?


